PolyPartition
PolyPartition is a lightweight C++ library for polygon partition and triangulation. PolyPartition implements multiple algorithms for both convex partitioning and triangulation. Different algorithms produce different quality of results (and their complexity varies accordingly). The implemented methods/algorithms with their advantages and disadvantages are outlined below.
For input parameters and return values see method declarations in polypartition.h. All methods require that the input polygons are not self-intersecting, and are defined in the correct vertex order (conter-clockwise for non-holes, clockwise for holes). Polygon vertices can easily be ordered correctly by calling TPPLPoly::SetOrientation method.
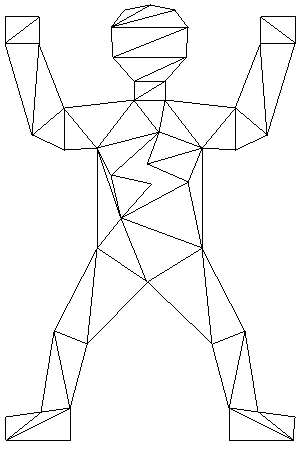
Triangulation by ear clipping
Method: TPPLPartition::Triangulate_EC
Time/Space complexity: O(n^2)/O(n)
Supports holes: Yes, by calling TPPLPartition::RemoveHoles
Quality of solution: Satisfactory in most cases
Example:
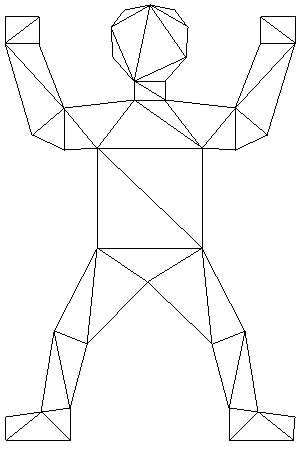
Optimal triangulation in terms of edge length using dynamic programming algorithm
Method: TPPLPartition::Triangulate_OPT
Time/Space complexity: O(n^3)/O(n^2)
Supports holes: No. You could call TPPLPartition::RemoveHoles prior to calling TPPLPartition::Triangulate_OPT, but the solution would no longer be optimal, thus defeating the purpose
Quality of solution: Optimal in terms of minimal edge length
Example:
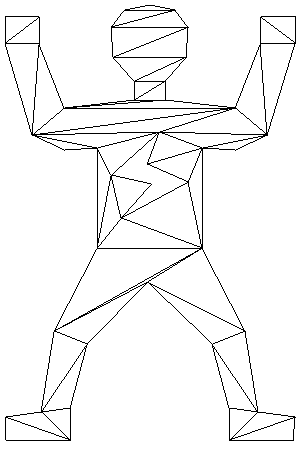
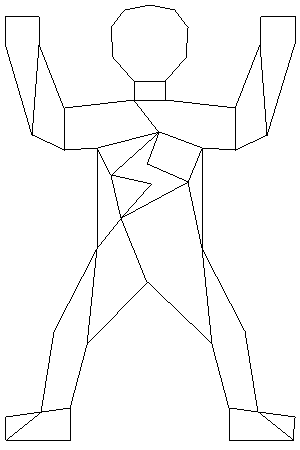
Triangulation by partition into monotone polygons
Method: TPPLPartition::Triangulate_MONO
Time/Space complexity: O(n*log(n))/O(n)
Supports holes: Yes, by design
Quality of solution: Poor. Many thin triangles are created in most cases
Example:
Convex partition using Hertel-Mehlhorn algorithm
Method: TPPLPartition::ConvexPartition_HM
Time/Space complexity: O(n^2)/O(n)
Supports holes: Yes, by calling TPPLPartition::RemoveHoles
Quality of solution: At most four times the minimum number of convex polygons is created. However, in practice it works much better than that and often gives optimal partition.
Example:
Optimal convex partition using dynamic programming algorithm by Keil and Snoeyink
Method: TPPLPartition::ConvexPartition_OPT
Time/Space complexity: O(n^3)/O(n^3)
Supports holes: No. You could call TPPLPartition::RemoveHoles prior to calling TPPLPartition::Triangulate_OPT, but the solution would no longer be optimal, thus defeating the purpose
Quality of solution: Optimal. A minimum number of convex polygons is produced
Example: